Getting Started
Setup
The setup consists of RPi4 acting as a server for the inbound commands issued by the
STM32H7555 board. The RPi4 can be used also for development & flashing the STM32H7555 board
since it is running Ubuntu. The steps from this page can be executed on the RPi4 board.
The steps marked with
can be executed on the Raspberry from the test setup.
Hardware
RPi4 (x1)
FTDI 232 (x1)
NUCLEO H755 (x1)
SPI SD Card Module (x1)
Mini USB cables (x1) - FTDI
Micro USB cable (x1) - Debug UART
Micro HDMI cable (x1) - Monitor
Keyboard & mouse
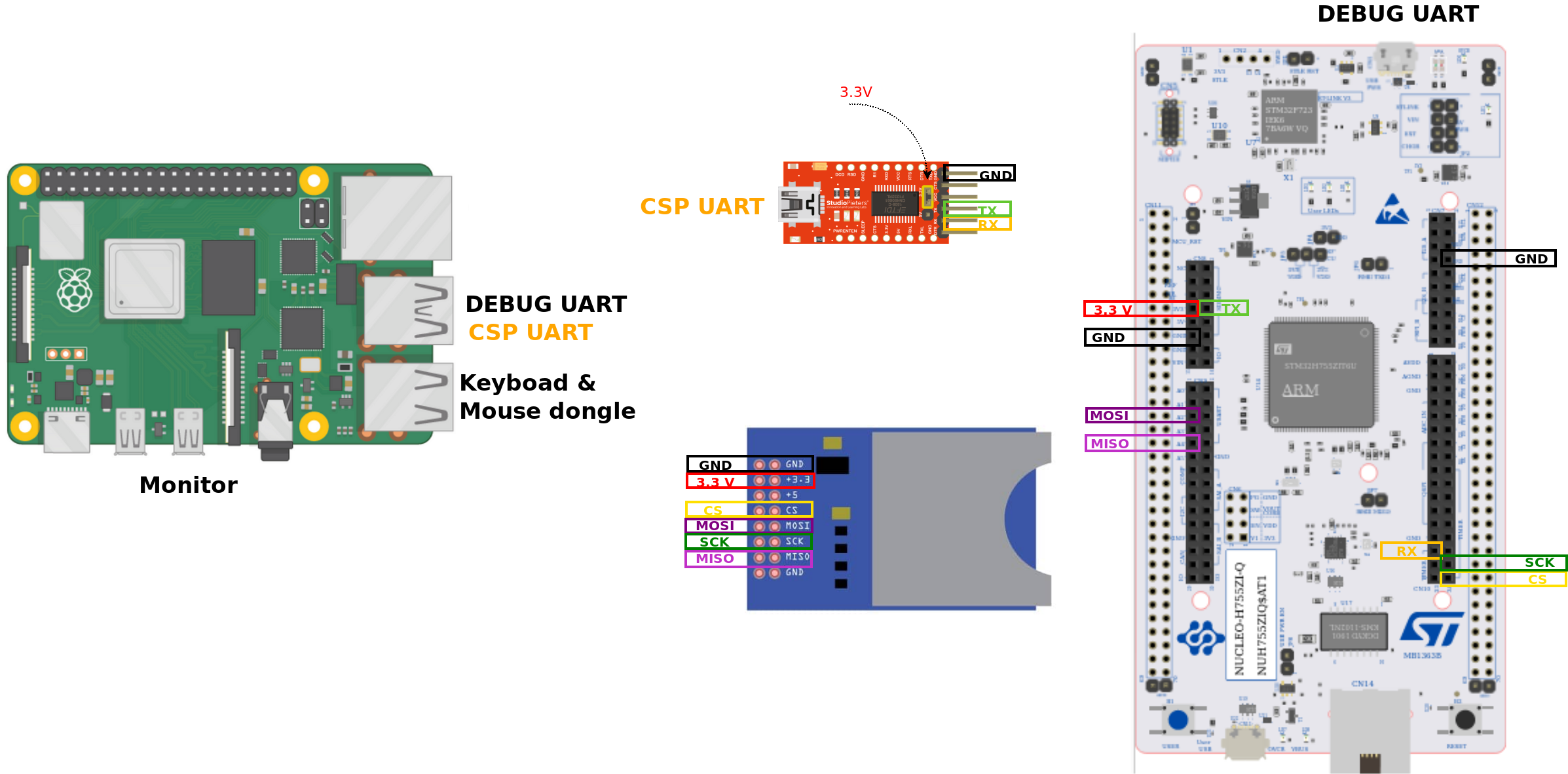

Warning
Please note that the FTDI chips should be configured with jumper on 3.3v
Dependencies
cmake - Build system
openocd - Flashing & debug utilities
gcc-arm-none-eabi - Cross compiler
gdb-multiarch - Debug utility
minicom - Debug utility (serial console)
To install the dependencies use the following command
$ sudo apt-get -y install cmake openocd gcc-arm-none-eabi build-essential gdb-multiarch libnewlib-arm-none-eabi minicom
Usage
Clone the repository
$ git clone https://github.com/endurosat/es-csp-client-freertos
Build
$ source configure
$ es_build
The resulting build artefacts are stored inside the build directory. After a succesfull
build the contents of this directory should look like this:
. build
├── CMakeCache.txt
├── CMakeFiles
├── cmake_install.cmake
├── csp
├── esclient-api
├── es_client_lib_CM7.bin
├── es_client_lib_CM7.elf
├── es_client_lib_CM7.hex
├── es_client_lib_CM7.map
├── FATFS
├── FreeRTOS
├── HAL
└── Makefile
Open the Debug UART
$ minicom -b 115200 -D /dev/ttyACM0
Start the ES CSP server
In order to build and start the es csp server for these instructions
Flash the target (STM32H755 Nucleo Board)
Use the following command to flash the target.
$ source configure
$ es_flash_target
At this point the green LED on the development board should be toggling each 1000ms. The yellow LED is toggled on each byte received over the UART. The red LED is set if the application enters an error hook.
On the debug UART similar output to the one below should be displayed:
2 main [INFO] (47): ES Client v100
5 es_sd_card [INFO] (576): SD Card Mounted Successfully
5 es_sd_card [INFO] (580): TotalSpace : 7794688 bytes, FreeSpace = 7791264 bytes
5 es_client [TRACE] (54): Initializing ES Client
5 es_tasks [INFO] (108): Starting: Default task
5 es_tasks [INFO] (108): Starting: ES Client task
.
.
.